



全自动端子收料机操作方式
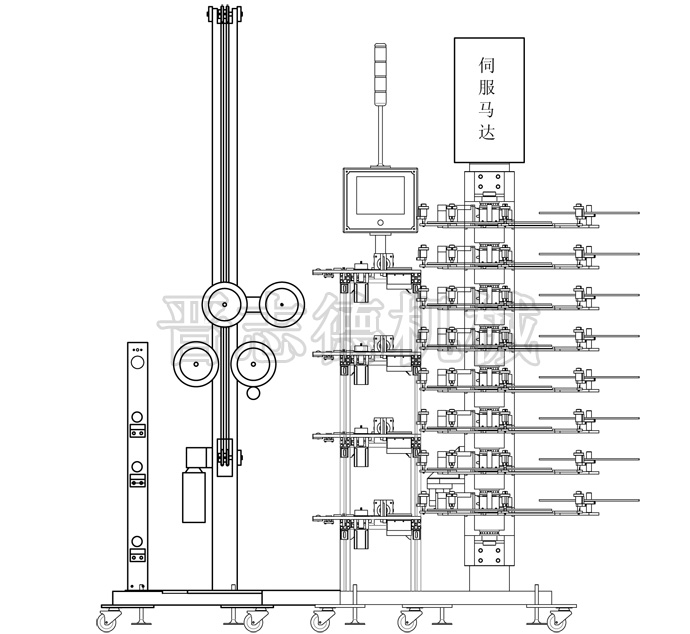
全自动端子收料机主要有四个部分构成:光电部分,存储器部分,入料部分和主机部分。伺服马达控制端子盘上下升降,由于冲床速度快,而且换盘时间少,增加存储器装置(目的是换盘时存储端子,收料时释放端子);端子盘的速度采用光电传感器分段控制,同时利用光电控制存储器的启停,每部分都由电气控制,同时每部分又相互关联。
光电部分主要有16个光电传感器,分成四组,通过PLC产生不同的速度,同时有急停信号的上下限,控制全自动端子收料机的急停。
存储器部分有个小伺服马达控制,其目的是控制存储器的上升和下降,有两个传感器控制其上下限。
入料部分:有8个步进马达、4个高速计数装置、12个气缸、24个传感器,其中一组伺服马达负责送料,另外一组马达负责变化角度转角(即在运转构成,会缓慢运转,有传感器来实现定位和限位。)
主机部分:有1个大伺服马达、8个蜗轮马达、8个纸带传感器,大伺服马达主责全自动端子收料机主轴上下升降,蜗轮马达负责端子盘的运转,传感器负责检测纸带有无,从而通知端子收料机急停。
晋志德全自动端子收料机操作分成两部分,即手动状态和自动状态。
在手动情况下,全自动端子收料机主轴可以实现上升与下降,并且有其手动速度,同时可以根据需要进行主轴定位,定位距离可以调整;存储器的小伺服也可以手动上升或下降,并由其速度调整。收料盘8盘可以各自立运转,并速度可调,同时方向可以调整;入料部分的各个气缸都可以立操作;四个步进马达也可以自运转,手动速度可调(即在手动情况下,全自动端子收料机的动作都能实现人为控制。
在自动情况下,存储器的小伺服升降可以根据主机部分的运转状态,并通过光电传感器检测端子的下垂量,来控制存储器的运转(上升或者下降,速度变化)。当所有条件复位,不发生干涉的情况下,主机正常启动后,能够进行自动收料,其速度主要有端子在光电传感器的位置来确定。当料盘收取完成后,后步进马达带动入料装置回归,回归后伺服马达带动主轴上下运转(其中入料部分的一组气缸动作夹住材料,并切断材料,同时驱动前步进马达运转并送料,此时裁断材料并取样,之后回位置),进行自动换盘,(此过程由于冲床不停机,会产生多余的端子,此时根据端子的下垂量,自动控制存储器的上升或停止),换盘完成后,主机部分自动进入生产后,此时存储器下降,并根据光电部分的光电传感器控制其速度。在收料过程中,端子收料马达的速度由光电传感器来控制,换盘时定位准确,换盘后又可以进行自动生产,循环使用。
8个纸带传感器有自立开关,可以进行有无控制;各自操作过程中的复位和互锁功能;显示屏有报警提示功能;计数功能。
文章发表:http://www.kssmc.com/news_qzddzsl.html